專注電(diàn)機檢測行業
0571-88775183
13516800348

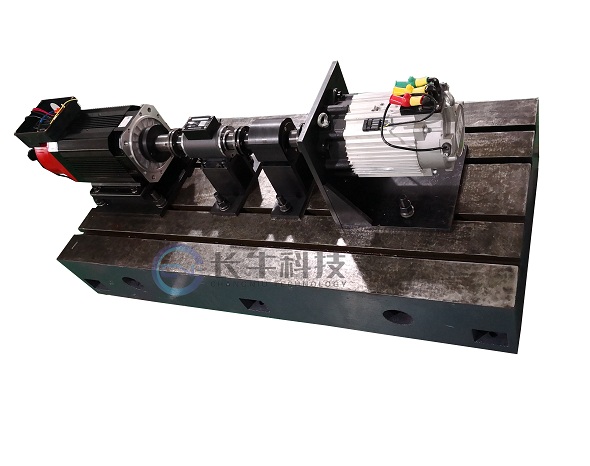
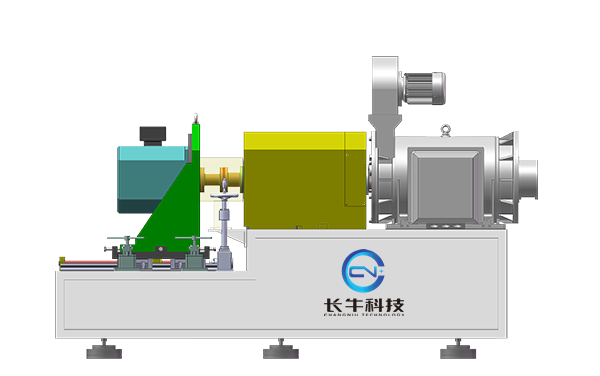
産(chǎn)品名(míng)稱:曳引機空載性能(néng)測試台
産(chǎn)品介紹:
曳引機空載測試台
該設備主要是用(yòng)于測量曳引機空載性能(néng)而非标定制的設備。系統采用(yòng)工(gōng)業計算機并配合測試軟件對産(chǎn)品進行測試以及控制,并對測試結果自動進行分(fēn)析、判斷、統計、存儲、打印。軟件可(kě)預存用(yòng)戶全部參數,以備檢測時調用(yòng)。
二、設備使用(yòng)環境:
電(diàn)源波動範圍:電(diàn)壓3800V±10%,頻率50Hz±10Hz。
溫度:波動範圍-30℃—60℃。
濕度:小(xiǎo)于95%。
三、具(jù)體(tǐ)測量内容:
1、上位機軟件實現曳引機動态自學(xué)習(無需人工(gōng)控制操作(zuò)盤)。
2、 空載電(diàn)壓、電(diàn)流測試(以及電(diàn)壓、電(diàn)流不平衡度)。
3、 空載運行噪聲(需要放置在靜音房裏測試)。
4、 制動器吸合、釋放噪聲(取吸合釋放的最大值)。
5、 制動器的吸合電(diàn)壓和釋放電(diàn)壓,制動器電(diàn)壓範圍DC0-200V可(kě)調。
6、 曳引機運行的水平振動速度和垂直振動速度。
7、 微動開關的同步性測試和微動開關的吸合時間和釋放時間。
四、軟件測試功能(néng)
标準軟件描述,以到貨設備軟件為(wèi)準,可(kě)非标定制
通過軟件,該系統可(kě)以進行如下項目的測試
1、曳引機動态自學(xué)習
默納克和SMART變頻器可(kě)通過上位機軟件來設置電(diàn)機的額定參數(例如轉速、極對數、功率、電(diàn)壓等),額定參數下發到到曳引機驅動變頻器,下發完成後,變頻器自動對曳引機進行動态學(xué)習,動态學(xué)習時間約為(wèi)1分(fēn)鍾(暫定為(wèi)采用(yòng)完整的動态自學(xué)習),完成後上位機軟件自動讀取編碼器磁極角度值、斷電(diàn)角度、接線(xiàn)方式、定子電(diàn)阻、Q軸電(diàn)感、D軸電(diàn)感、電(diàn)流比例增益、電(diàn)流積分(fēn)增益等參數。
備注:我公(gōng)司在默納克變頻器控制曳引機測試方面有(yǒu)着豐富的經驗,目前動态自學(xué)習有(yǒu)兩種方法,一種是完整自學(xué)習,時間大約1分(fēn)鍾,另一種是快速自學(xué)習,時間大約10S左右,快速學(xué)習方法目前已在其他(tā)家曳引機的混裝(zhuāng)線(xiàn)上經過測試并驗證,兩種方法無差别。為(wèi)了提高測試效率,我公(gōng)司也可(kě)以在測試軟件上植入快速自學(xué)習的測試模塊,以便後期需要。
2、測試空載運行電(diàn)壓、空載運行噪聲、振動速度
自學(xué)習完成後,軟件控制曳引機空載運轉(工(gōng)作(zuò)在額定轉速),同時測量曳引機的三相電(diàn)壓、三相電(diàn)流、電(diàn)流不平衡度、空載運行噪聲。操作(zuò)員可(kě)在軟件設置的空載運行時間内(該時間可(kě)以任意設置)觀測曳引機的運轉情況。
3、測試制動器噪音
1)軟件控制曳引機空載運轉之前,需要吸合釋放制動器,軟件同過噪聲測量儀來測量吸合瞬間的噪聲(噪聲測量儀可(kě)以捕捉噪聲最大值并自動保存)。
2)噪聲記錄數據分(fēn)為(wèi)手動和自動兩種,兩種方式在參數設置界面可(kě)選。
4、測量量兩微動開關的同步性,以及微動開關的吸合、釋放時間
微動開關同步性的測量:主要是利用(yòng)PLC的高速脈寬測量方法并結合外部電(diàn)路,高速測量兩微動開關的時間差,測量時間差為(wèi)1ms-2000ms,測量精(jīng)度可(kě)≤1ms
微動開關的吸合時間測試:利用(yòng)PLC高速采集,測量從制動器得電(diàn)開始到微動開關動作(zuò)後的具(jù)體(tǐ)時間,測量精(jīng)度可(kě)≤1ms
微動開關的釋放時間測試:利用(yòng)PLC高速采集,測量從制動器斷電(diàn)開始到微動開關閉合後的具(jù)體(tǐ)時間,測量精(jīng)度可(kě)≤1ms
5、測試制動器吸合和釋放電(diàn)壓(此功能(néng)可(kě)以通過界面開關控制)
将制動器的工(gōng)作(zuò)電(diàn)壓通過上位機軟件從0V(或設置初值)緩慢上升,經過曳引機上的微動開關反饋信号,來判斷制動器的最低吸合電(diàn)壓。接着将電(diàn)壓從吸合電(diàn)壓值緩慢下降,也是經過微動開關的反饋信号,來判斷制動器的最大釋放電(diàn)壓。